

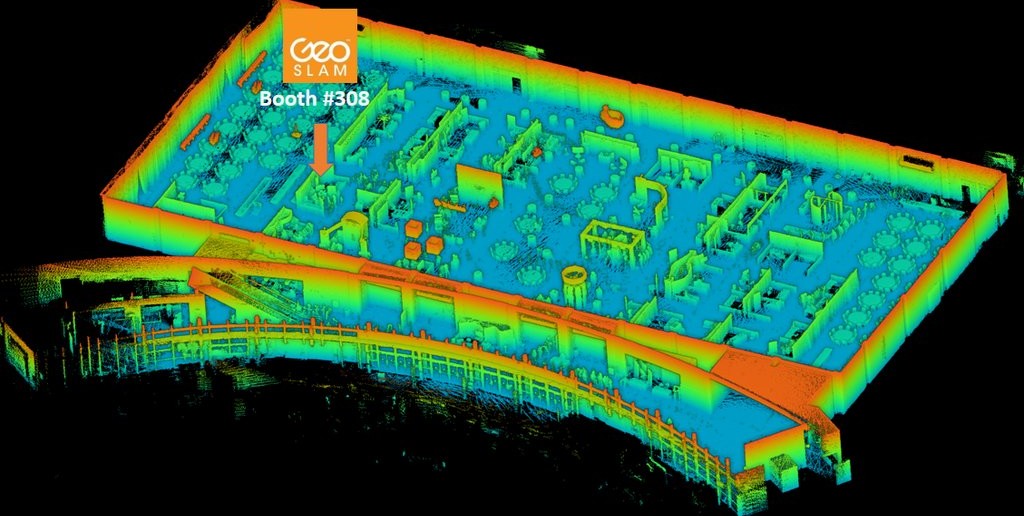
A map of the SPAR ’16 exhibit floor captured with the SurphSLAM.
What is SLAM?
I’ll do my best, as a technology writer (and not a technologist) to explain this. SLAM algorithms enable a device to build a map for its surrounding environment while, at the same time, locating itself within that map–these are two sides of the same coin and you won’t get one without the other. The technology comes from robotics. Researchers wanted to place a robot in a new environment and enable that robot teach itself to navigate that environment, all without accessing any pre-coded information. (For more information, check OpenSLAM’s description here.)
In addition to guiding robots around, SLAM can enable you to map indoors without GPS. There’s a catch: SLAM algorithms are not 100% perfect (for a litany of reasons I can only vaguely understand) at estimating position. The technology does its job beautifully at short distances, but gets less and less accurate the farther you venture from your starting point.
As you might expect, there are solutions to this problem, and those solutions are getting better. SLAM has already gotten good enough to enable new scanning workflows that we wouldn’t have attempted even a few years ago, and it looks like it’s just getting started.
Among recent SLAM solutions, algorithms from Real Earth and GeoSLAM have been getting the most publicity.